Einleitung
Die Baugruppe Bus-Signalanzeige wird innerhalb des Mikrocomputer-Baugruppensystems
unter anderem für Funktionsprüfungen eingesetzt. Sie dient der Anzeige der auf dem System-Bus anstehenden Adress-, Daten- und Steuersignale, wobei die Signale der 16 Adressleitungen vierstellig und die der 8 Datenleitungen zweistellig angezeigt werden, jeweils als Hexadezimalzahl. Die Steuersignale werden direkt durch Leuchtdioden
angezeigt.
Die Bus-Signalanzeige kann auch zusammen mit dem Mikroprozessor im vollständig
aufgebauten System zur Fehlersuche eingesetzt werden. Aufgrund der hohen Arbeitsgeschwindigkeit des Prozessors ändern sich dann allerdings die Signale auf dem Bus so schnell, daß die Anzeige nicht mehr ablesbar ist. Eine Zusatzschaltung sorgt in diesem Fall dafür, daß die Bus-Signale für eine längere Zeit stabil sind. Der Mikroprozessor wird dazu auf die Betriebsart »Einzelschritt« umgeschaltet und führt dann nur jeweils einen Arbeitsschritt aus, wenn man die Taste »Step« betätigt.
Sobald sich die Baugruppe am System-Bus befindet, werden die auf dem Adressbus
anstehende Adresse und der auf dem Datenbus anstehende Datenwert in hexadezimaler
Form angezeigt. Jede hexadezimale Anzeige stellt die Bitkombination von vier
Signalleitungen dar. Daher ist die Adreßanzeige vierstellig (16 Bit) und die Datenanzeige
zweistellig (8 Bit) .
Blockschaltbild, Aufbau und Wirkungsweise der Bus-Signalanzeige
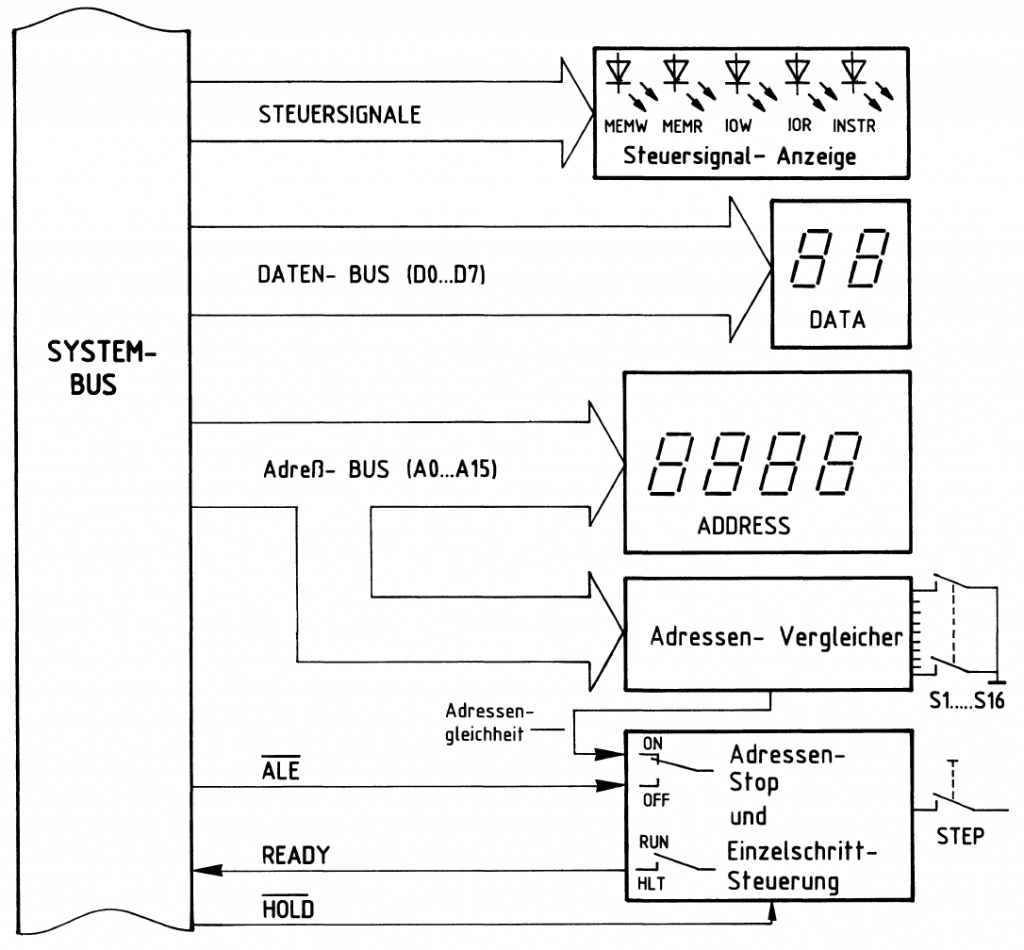
Bild 9: Das Blockschaltbild der Bus-Signalanzeige
Im Funktionsblock Steuersignal-Anzeige werden die Steuersignale
- MEMW (Schreiben in Speicherstellen)
- MEMR (Lesen von Speicherstellen)
- IOW (Schreiben in Ausgabe-Baugruppen)
- IOR (Lesen von Eingabe-Baugruppen)
- INSTR (Befehlsholphase)
über Leuchtdioden angezeigt, und zwar immer dann, wenn sie aktiv sind, d. h. wenn
sie gerade wirken.
Die Einzelschritt-Steuerung hat die Aufgabe, den Prozessor zum schrittweisen Arbeiten zu veranlassen, damit die Signale auf dem System-Bus längere Zeit unverändert bleiben. Dadurch kann man den Funktionsablauf im Mikrocomputer auch ohne Einsatz von Messgeräten (z.B. eines Logikanalysators) verfolgen.
Um die Einzelschritt-Steuerung zu aktivieren, muss
- der Schalter »Adr.-Stop ON/OFF« in Stellung OFF und
- der Schalter »RUN/HLT« in Stellung HLT stehen.
Mit dem Betätigen der STEP-Taste wird der Prozessor über die Leitung READY freigegeben und beginnt mit der Bearbeitung des aktuellen Programmschrittes. Nach Abarbeitung dieses Schrittes sendet der Prozessor über die ALE-Leitung einen L-Impuls an die Einzelschritt-Steuerung. Dieser Impuls bringt die READY-Leitung auf L-Pegel, wodurch der Prozessor angehalten wird. Bei erneuter Betätigung der STEPTaste wiederholt sich der Vorgang.
Über die HOLD-Leitung kann eine weitere Baugruppe, der Bus-Signalgeber, sofern sie sich mit am System-Bus befindet und aktiv ist, die Wirkung des READY-Signals aufheben und ihrerseits den Prozessor anhalten.
Manchmal ist es erforderlich, die Einzelschritt-Steuerung zu aktivieren, wenn auf dem Adressbus eine ganz bestimmte Bitkombination (Adresse) ansteht. Dazu befindet sich auf dieser Baugruppe der Adressvergleicher, der den Signalzustand des Adreßbusses mit dem Signalzustand an allen Schaltern S1 bis S16 vergleicht. Bei Übereinstimmung wird über die Leitung Adressengleichheit ebenfalls ein Anhalten der CPU bewirkt.
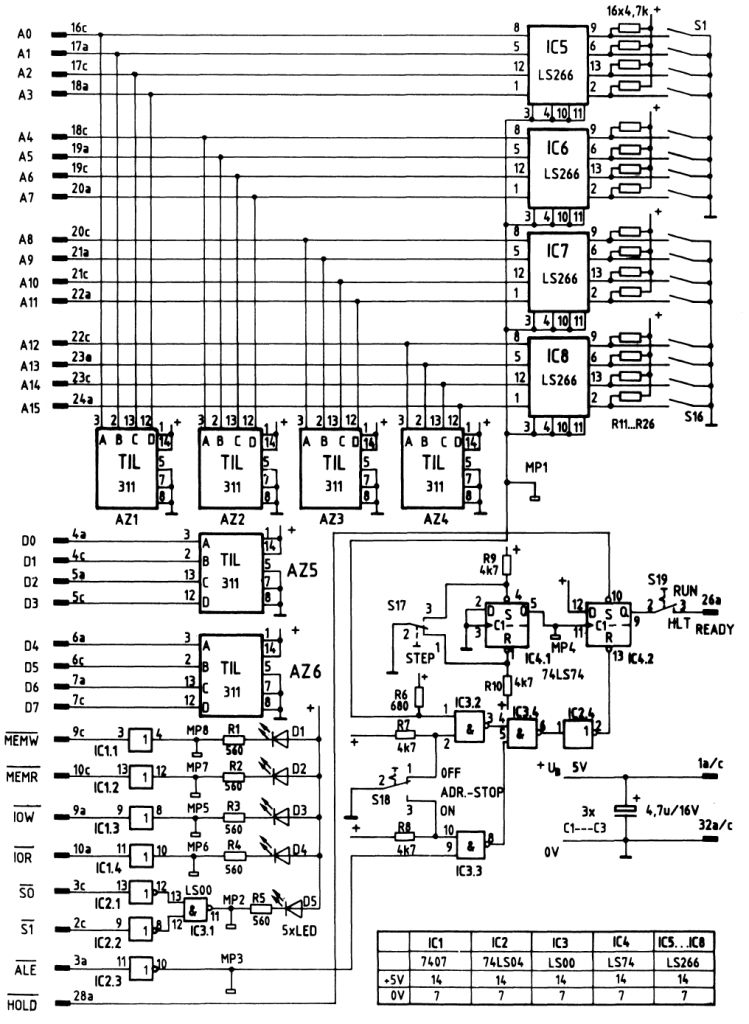
Bild 10: Der Stromlaufplan der Bus-Signalanzeige
Die Daten- und Adreß-Anzeige
Die in Bild 10 dargestellten Anzeige-Bausteine AZ1 bis AZ4 dienen der Anzeige der Adressen-Signale, und die Anzeige-Bausteine AZ5 und AZ6 zeigen die Datensignale an.
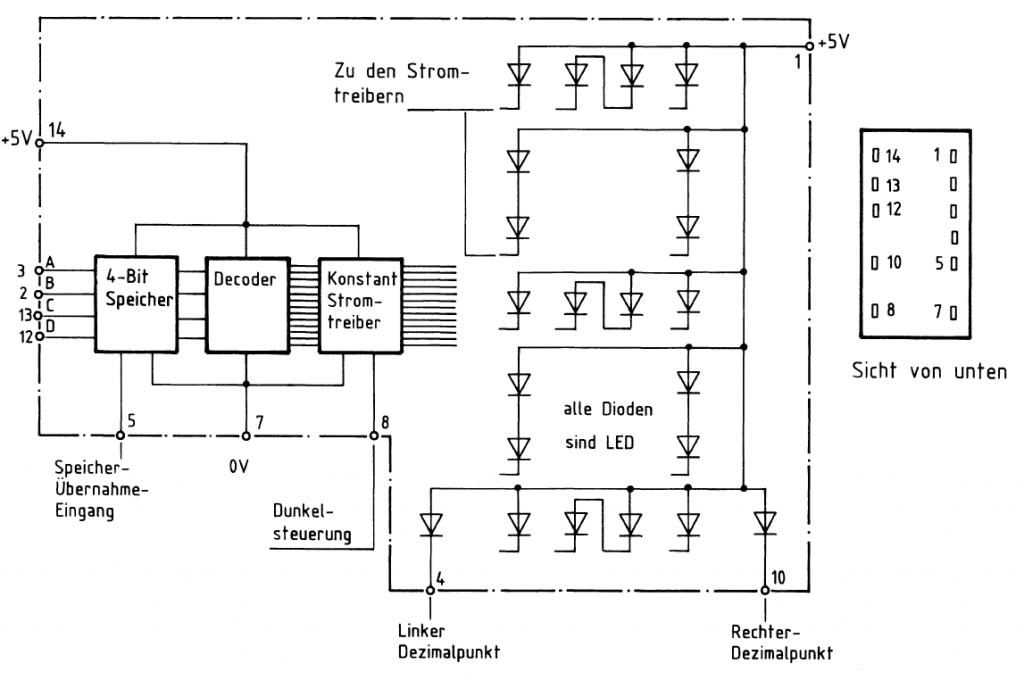
Bild 11 : Blockaufbau und Pin-Belegung der Hexadezimal-Anzeige TIL 311.
Die an den Daten-Eingängen A, B, C und D anliegenden Signale werden bei einem L-Pegel am Speicherübernahme-Eingang (5) in den internen 4-Bit-Speicher übernommen und im Decoder decodiert. Der Decoder steuert dann die entsprechenden Leuchtdioden an, die dem Hexadezimalwert des Binärzeichens am Eingang entsprechen. Da in der vorliegenden Anwendung die Dunkelsteuerung (8) nicht verwendet wird – die Anzeige läßt sich mit einem H-Pegel dunkelsteuern – , liegt dieser Eingang auf L-Pegel. Die Dezimalpunkt-Eingänge 4 und 10 werden ebenfalls nicht verwendet und bleiben deshalb unbeschaltet.

Bild 12: Die Anzeige der Eingangspegel als Hexadezimalzahl
Die Steuersignal-Anzeige
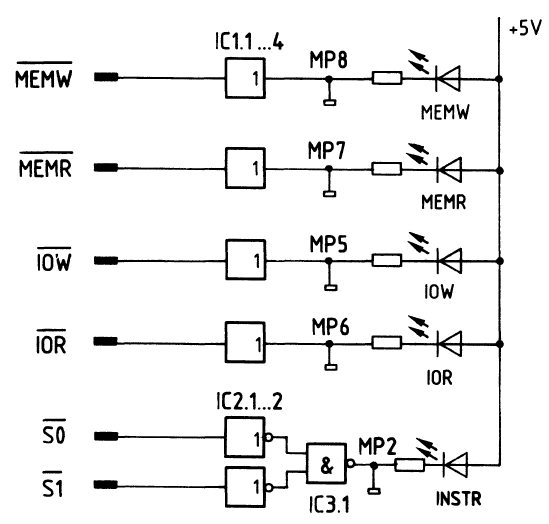
Bild 13: Die Anzeige der Steuersignale
Alle Steuersignale werden mit Leuchtdioden angezeigt; die vorgeschalteten ICs dienen als Treiber. Ist z.B. das Signal MEMR aktiv, führt also L-Pegel, so nimmt der Ausgang des ICl.1 ebenfalls L-Pegel an, und die LED »MEMR« leuchtet. Die LED »INSTR« (Befehlsholphase) leuchtet nur dann, wenn die Signale der Leitungen S0 bis S1 L-Pegel führen. Das aber ist nur der Fall, wenn sich die CPU-Baugruppe gleichzeitig
am System-Bus befindet und der Mikroprozessor gerade einen Befehl aus dem Speicher holt.
Der Adressen-Vergleicher
Der Adressen-Vergleicher besteht aus den integrierten Schaltkreisen IC5 bis IC8 (siehe Bild 10). Er vergleicht die Pegel der 16 Adreßleitungen mit den Pegeln, die mit den Schaltern Sl bis S16 eingestellt werden können. Nur wenn alle übereinstimmen (A1 = S1, A1 = S2, usw.), liefert der Adressvergleicher auf der Leitung »Adressengleichheit« ein H-Signal.
Bild 14 zeigt für die Adressenleitungen A0 bis A3 den Stromlaufplan des Adressen-Vergleichers. Da ein IC nur vier Adressenpegel mit den entsprechenden Sehalterpegeln vergleichen kann, sind vier solcher ICs erforderlich.
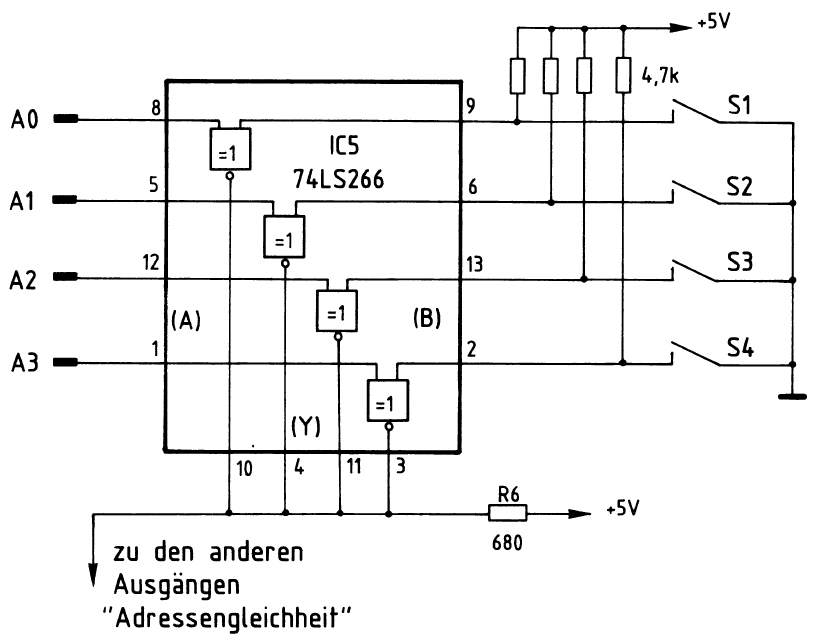
Bild 14: Der Adressenvergleicher, für 4 Adreßleitungen dargestellt, und die Funktionstabelle des 74LS266
Der integrierte Schaltkreis 74LS266 enthält vier Exklusiv-NOR-Gatter mit je 2 Eingängen. Jedes der vier Gatter hat einen open-collector-Ausgang. Der Widerstand R6 ist für alle Ausgänge der gemeinsame Kollektor-Widerstand.
Die Leitung Adressengleichheit kann nur dann H-Pegel annehmen, wenn die Ausgänge aller 16 Gatter (in Bild 14 nur vier dargestellt) H-Pegel führen. Laut Funktionstabelle für die Gatter müssen dazu die Pegel an den A-Eingängen, die mit den Adressleitungen verbunden sind, gleich denen an den B-Eingängen sein, die mit den Schaltern verbunden sind. Ungleiche Pegel an den Eingängen ergeben L-Pegel am Y-Ausgang und damit auch auf der Leitung Adressengleichheit.
Offene Schalter erzeugen an den entsprechenden B-Eingängen H-Pegel, geschlossene Schalter L-Pegel. Die in Bild 14 dargestellte Schaltung nennt man auch 4-Bit-Komparator (4-Bit-Vergleicher). Vier solcher Schaltungen bilden dann einen 16-Bit-Komparator. Dabei müssen die Ausgänge aller 16 Gatter miteinander verbunden sein (siehe Bild 10).
Adressenstop und Einzelschritt-Steuerung
Bild 15 zeigt den Stromlaufplan für diesen Teil der Schaltung. Hier soll nur die Wirkungsweise der Schaltung erklärt werden, nicht aber das Zusammenwirken mit der CPU-Baugruppe.
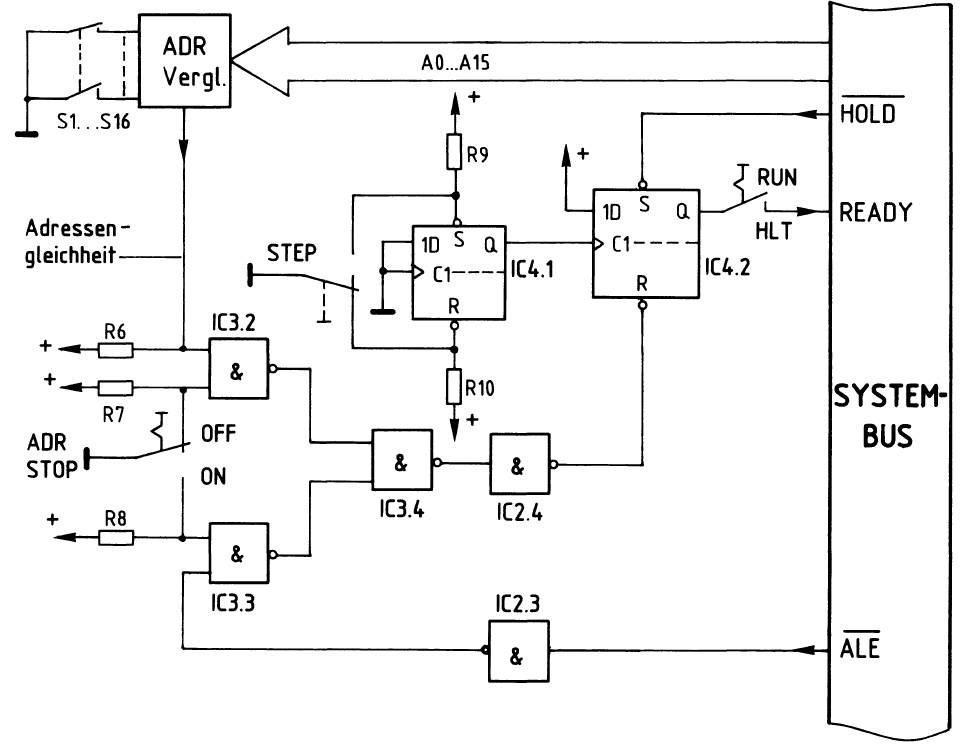
Bild 15: Der Stromlaufplan für Adressenstop und Einzelschritt-Steuerung
Nach dem Einschalten der Betriebsspannung nimmt der Q-Ausgang von IC4.2 (DFlipflop) entweder H- oder L-Pegel (Zufall) an. Ein L-Impuls an HOLD setzt das Flipflop, d. h. sein Q-Ausgang nimmt H-Pegel an. Ein L-Impuls am Rücksetz-Eingang R bringt den Ausgang auf L-Pegel. Dieser L-Impuls kann auf zweierlei Weise erzeugt werden:
- durch einen L-Impuls auf der Leitung ALE; der ADR-STOP-Schalter muß dann in Stellung OFF stehen; oder
- durch einen H-Impuls auf der Leitung Adressengleichheit; der ADR-STOP-Schalter muß dann in Stellung ON stehen.
Ein nun folgender L-H-Sprung am Takteingang C1 von IC4.2 setzt den Q-Ausgang wieder auf H-Pegel. Erzeugt wird ein solcher L-H-Sprung durch Betätigen der STEP-Taste. Das IC4.1 übernimmt dabei die Entprellung der Taste. Der oben erklärte Zusammenhang aller Signale ist im Bild 16 als Liniendiägramm
dargestellt.

Bild 16: Liniendiagramm der Signale HOLD, ALE, ADR-Gleichheit, Q4.1 und Q4.2
Sind alle Baugruppen eines Mikrocomputer-Baugruppensystems fertig und sorgfältig überprüft, so kann das Gesamtsystem in Betrieb genommen werden. Hierbei sollte man unbedingt schrittweise vorgehen, denn nur so lassen sich eventuell noch vorhandene Fehler finden.
Der erste Prüfschritt beschränkt sich auf den Test des Zusammenspiels von Prozessor und RAM-Speicher. In weiteren Prüfschritten werden dann die Ausgabe- und die Eingabe-Baugruppe in den Funktionstest mit einbezogen.
Bei den ersten Prüfschritten werden mit Hilfe des Bus-Signalgebers kleine Testprogramme in den RAM-Speicher eingeschrieben. Anschließend wird das Zusammenarbeiten der Baugruppen im Einzelschrittbetrieb über die Bus-Signalanzeige und bei normaler Arbeitsgeschwindigkeit des Prozessors mit einem Oszilloskop verfolgt. (Erst danach wird das System in Verbindung mit dem Betriebs1iogramm in Betrieb genommen und die Datensichtstation angeschlossen; dies ist jedoch nicht mehr Gegenstand
dieses Buches.)
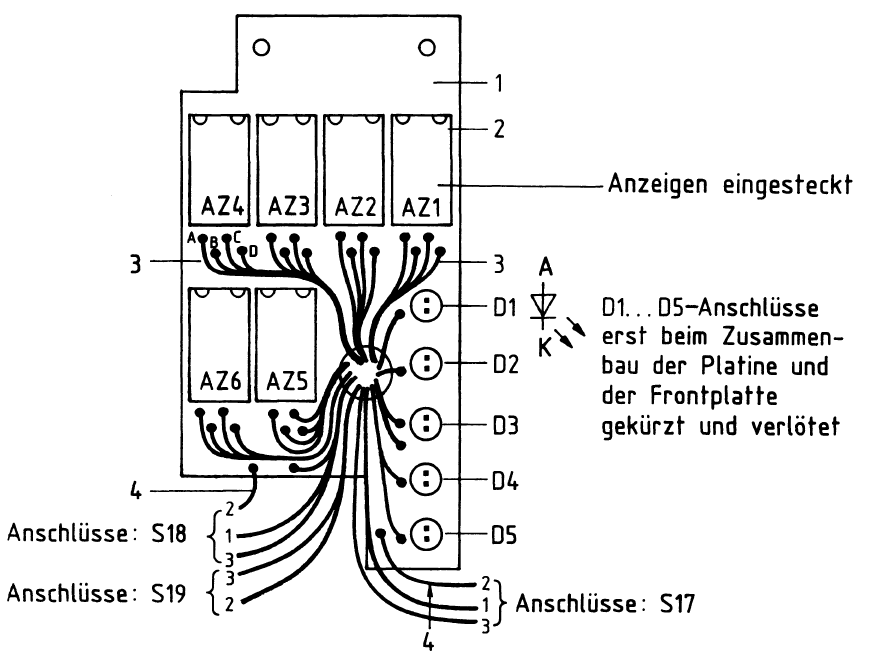
Bestückungsplan

Steckerbelegung

Verdrahtungsplan